Uncertainty quantification
2016-12-26 — 2024-06-06
Wherein Machine Learning Predictions Are Furnished With Quantified Confidence, and the Distinction Between Aleatoric and Epistemic Uncertainty Is Explained, With Conformal Prediction Mentioned.
Using machine learning to make predictions, with a measure of the confidence of those predictions.
Closely related, perhaps identical: sensitivity analysis.
1 Taxonomy
Should clarify. TBD. Here is a recent reference on the theme: Kendall and Gal (2017) This extricates aleatoric and epistemic uncertainty. Also to mention, model uncertainty.
2 DUQ networks
3 Bayes
Bayes methods have some ideas of uncertainty baked in. You can get some way with, e.g., Gaussian process regression, or probabilistic NNs.
4 Physical model calibration
PEST, PEST++, and pyemu are some integrated systems for uncertainty quantification that use some weird terminology, such as FOSM (First-order-second-moment) models. I think these might be best considered as inverse problem solvers, and the uncertainty quantification is a side effect of the inversion.
5 Conformal prediction
See conformal prediction.
6 Uncertainty Quantification 360
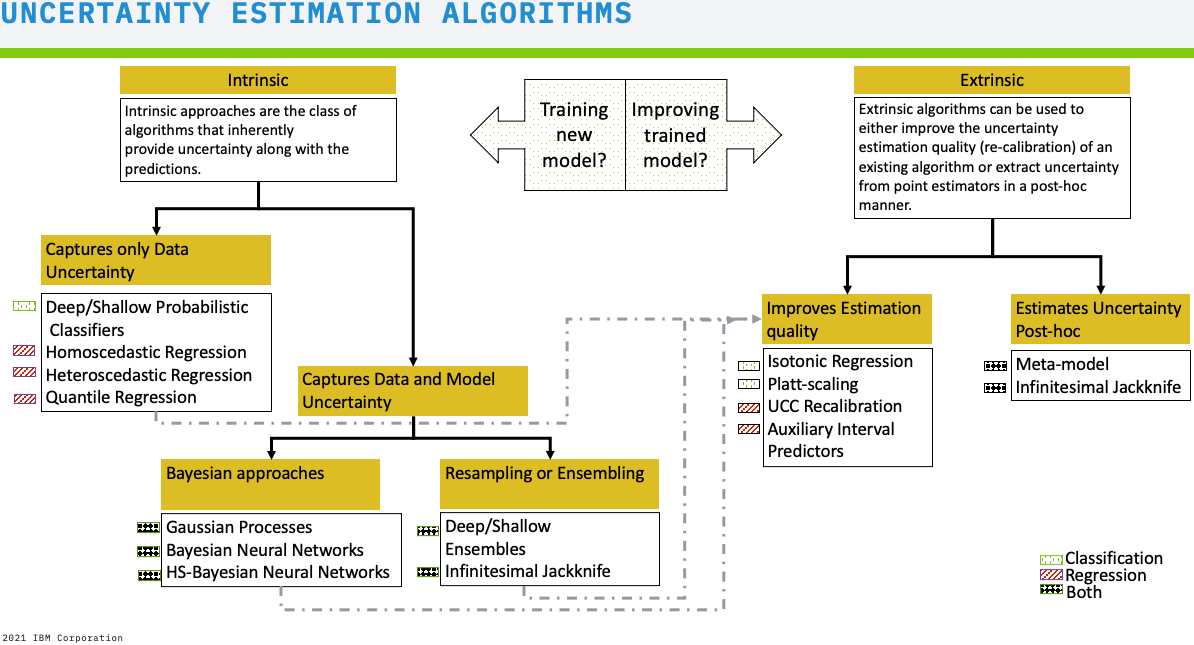
IBM’s Uncertainty Quantification 360 toolkit provides a summary of popular generic methods:
- Auxiliary Interval Predictor
Use an auxiliary model to improve the calibration of UQ generated by the original model.
- Blackbox Metamodel Classification
Extract confidence scores from trained black-box classification models using a meta-model.
- Blackbox Metamodel Regression
Extract prediction intervals from trained black-box regression models using a meta-model.
- Classification Calibration
Post-hoc calibration of classification models using Isotonic Regression and Platt Scaling.
- Heteroscedastic Regression
- Homoscedastic Gaussian Process Regression
- Horseshoe BNN classification
- Horseshoe BNN regression
- Infinitesimal Jackknife
- Quantile Regression
- UCC Recalibration
They provide guidance on method selection in the manual: